Nuclear inspection robot promises safer inspection of fuel ponds
A prototype autonomous machine developed with the help of CSIRO’s Data61 division has successfully completed a trial at an operating nuclear energy site in South America, collecting real-time data useful for safeguards verification.
The robot is referred to as a “Robotized Cherenkov Viewing Device” (RCVD) and was developed in a collaboration between Data61, Hungarian robotics company Datastart, and the International Atomic Energy Agency.
RCVD uses the Wildcat SLAM (simultaneous localisation and mapping) developed by Data61 – and used by the team that placed second in the DARPA SubT Challenge – for its navigation.
The device autonomously navigates in a spent fuel pond, collecting “updating a real-time map with footage and data of the fuel assemblies” according to a statement from CSIRO on Tuesday, and “analyses each assembly’s position and unique signature to detect if fuel has been removed or replaced.”
Inspections are currently done manually by humans on a platform suspended above a pond, using a camera-like device, and sometimes in 40-degree Celsius heat, said Rosie Attwell, CSIRO Technical Program Manager.
“The test demonstrates that autonomous robots could soon assist with field measurement and analysis of spent nuclear fuel, providing greater protection for human workers,” she added.
Datastart’s CEO Peter Kopias described it as a “seamless integration of the hardware developed by Datastart and CSIRO's own navigation stack” and the project a successful intercontinental engineering collaboration.
“Moving personnel out of harm's way is the most important benefit, but the exceptional data quality and the ability to inspect previously unreachable covered areas is a game changer in nuclear inspection.” Kopias said.
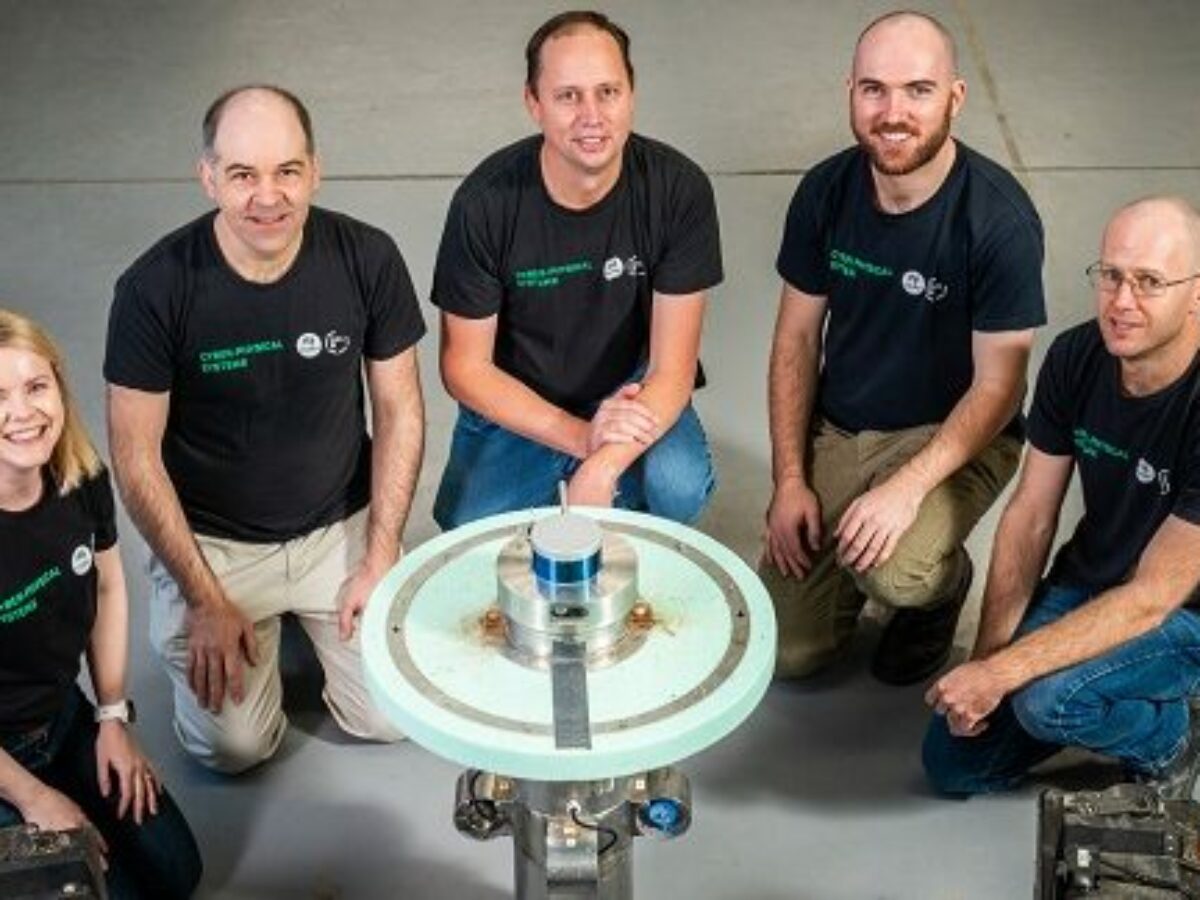
Picture: CSIRO team members with RCVD (supplied)
Further reading
Topics Manufacturing News
More in this section


@aumanufacturing Sections
Analysis and Commentary Awards casino reviews Defence Gambling Manufacturing News Online Casino Podcast Technology Videos